ハンディ3Dスキャナー DPI-8X(オーピーティー)
ハンディ3Dスキャナーは移動させながら、3Dデータの取得が可能!計測中にPCの画面を見ながら測定する必要はなく、タブレット1つで高速かつ非接触計測で点群データの出力が可能です
高密度・高精度で、短時間で計測して点群データを取得します。DPIは一度にスキャンできる範囲としては、全周で10m程度(車1台)が適正サイズです。橋桁の下や複雑な形状の構造物などの極小エリアで計測する最適なツールです。
※2つのレンジタイプからお選びいただけます。
|
| 機種名 |
ハンディ3Dスキャナー |
| 型番 |
DPI-8X |
| メーカー名 |
オーピーティー |
|
|
|
特長
橋脚の下などを地上型レーザー3Dスキャナーで計測する場合、設備機器や橋桁が障害となり、一度に全体をスキャンできません。また計測する対象物へのアクセスの問題もあります。本機は、高密度・高精度で、短時間で計測して点群データを取得し、対象物まで2mまで計測できます。ハンディタイプのため、対象物の後ろに回ってスキャンでき、手が届くところであればどこでも計測できます。
また、スキャンと同時にカラー画像を取得できます。
- タブレットを内蔵したDPI-8Xは移動しながら計測し、取り残しは無いか現場で確認できます。
- 取り残しが有り再度スキャンする場合でも、(周辺の)取得済みのスキャンデータと自動で合成します(Append to Scan機能)。
- 対象物にターゲットを貼ることなく、対象物の表面形状を捉えながら自動でデータを合成します。
- スキャンの際にはGPS地図データも同時に取得するため、計測現場を特定できます。
- 距離3mまでの対象物を高速でスキャンし、点データを作成します。
〇
DPI-8Xハンディ3Dスキャナー
スキャンデータを高速で取り込みます。移動しながら、最長3m先の対象物を計測できます。従来のハンディ3Dスキャナーとは異なり、スキャナーとタブレットPCが一体型になっているため、計測中に画面を見ながら片手で操作できます。
〇
出力フォーマット
スキャンデータはPTSやPTXで出力できるため、ほとんどの3D CADソフトウエアで取り込むことができます。照度(Intensity)やカラー情報も出力できます。
用途例
極小空間の3D計測に最適
 極小スペースを3D計測する目的で開発され、込み入った施設など基本的に手が入ればスキャンが可能です。その場合センサーとタブレットを切り離し、センサーは手に持ちスキャンします。
左の画像はDPI-8Xを使用して乗用車外装と運転席をスキャンした例です。乗用車全体ではターゲットシートを利用しデータを合成しています。フェンダーミラー、バンパー、タイヤ等をスキャンしていますが、ガラス面は計測不可です。
極小スペースを3D計測する目的で開発され、込み入った施設など基本的に手が入ればスキャンが可能です。その場合センサーとタブレットを切り離し、センサーは手に持ちスキャンします。
左の画像はDPI-8Xを使用して乗用車外装と運転席をスキャンした例です。乗用車全体ではターゲットシートを利用しデータを合成しています。フェンダーミラー、バンパー、タイヤ等をスキャンしていますが、ガラス面は計測不可です。
車内計測
 ダッシュボードの下を計測することで、空間スペースの広がりやアクセル/ブレーキペタルの距離を測定できます。座席を含む車内全体を計測しモデル化することで、エアコンや外部からの風の流れをシミュレートする流体解析の元データとなります。人体の重みから形状変化する座席面を定量的にスキャンすることで、最適な“座り心地”を想定できます。
ダッシュボードの下を計測することで、空間スペースの広がりやアクセル/ブレーキペタルの距離を測定できます。座席を含む車内全体を計測しモデル化することで、エアコンや外部からの風の流れをシミュレートする流体解析の元データとなります。人体の重みから形状変化する座席面を定量的にスキャンすることで、最適な“座り心地”を想定できます。
トラックの助手席を計測
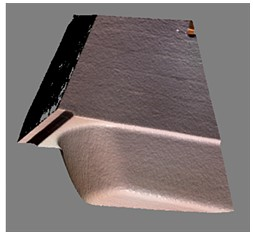
 左の画像は、約750万点の点群データです。点データであれば簡単に2点間の測長ができます。なお、DPI-8X 3Dスキャナーは黒い対象物でも、比較的良くデータを取得できます。
左の画像は、約750万点の点群データです。点データであれば簡単に2点間の測長ができます。なお、DPI-8X 3Dスキャナーは黒い対象物でも、比較的良くデータを取得できます。
構
点群データ処理ソフトウェア OPT CloudSurvey(オプション)
DPIスキャナーで出力されるオリジナルファイル(.dp)は高圧縮された特殊ファイルです。一般のアスキーテキストに比べ1/30~1/50のため、PCを介して圧縮をする手間なく、現場からメール添付などで転送をかけることもできます。
〇
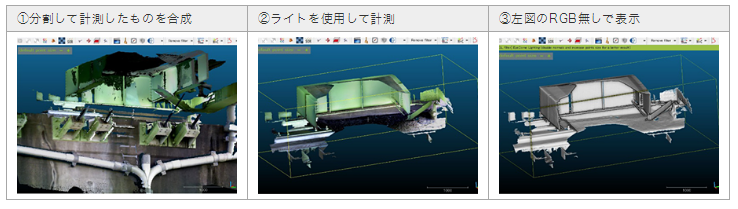
3Dスキャナーとの合成
DPIは一度にスキャンできる範囲としては、全周で10m程度(車1台)が適正サイズです。橋桁の下や複雑な形状の構造物などの極小エリアで計測する最適なツールです。単独で使用する以外、地上型3Dスキャナーでは取り切れない箇所をDPIでスキャンし、地上型3Dスキャナーのデータと合成できます。
〇
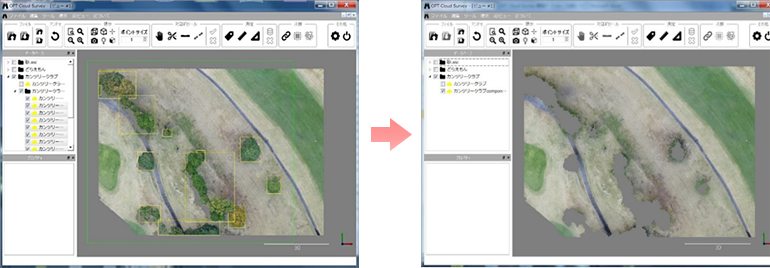
豊富なフィルタリング機能
膨大な点群データのフィルタリングには多くの時間がかかります。点データを自動(あるいは半自動)で編集できれば作業時間の軽減につながります。OPTクラウドサーベイには豊富なフィルタリング機能があります。設定ツールを使って点データをグループ化し不要な点データを一括削除できます。最終的な成果物は多くの場合図面のため、図化用CADへ渡すためにもこの機能はたいへん重要です。
〇
ハンディスキャナー用ターゲットの検出
ターゲット検出ソフトとして利用できます。サポートされているターゲットタイプは以下のとおりです。

〇
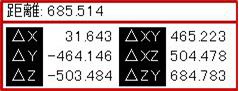
測定
三種類の計測が可能です。
・シングルポイントプローブ
・2点間の距離の測定
・3点のなす角度の測定

〇
ラベル
ラベルは2Dエンティティとして表示されます。
〇
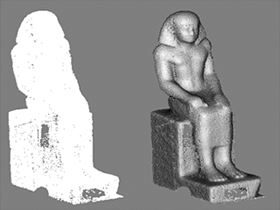
法線ベクトルの作成
点群あるいはメッシュの法線ベクトルを計算できます。
| 法線ベクトル計算前の点群 |
法線ベクトル計算後の点群 |
 |
 |
〇
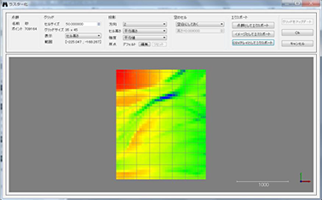
点データのラスター化
| 点データ |
ツール>点群>ラスター化を選択します |
 |
 |
〇
最遠ポイントの除去
2つの重なったデータからフィルター処理
例えば人や自動車が行き交う道路を計測する場合、時間をずらして2回スキャンします。2回のスキャンデータをマージさせ、合致しない差分が有れば自動で削除します。マニュアル作業に比べ、大幅に作業時間を削減できます。
〇
ムービーの作成
3Dスキャナー(Stencilなど)が扱うデータは大量のため、施主などエンドユーザへプレゼする場合は点群データそのものよりも、ムービーでの紹介が適しています。OPT Cloud Surveyはムービーの作成機能があり、オペレータ自ら、ちょうどpdfを作成するイメージで、ムービーを作成することができます。
〇
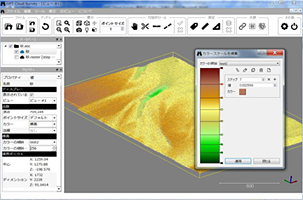
シェーディングの作成
3DスキャナーとしてVelodyneのセンサーが測量現場で多く使われています。Velodyneセンサーは、反射強度(Intensity)の強弱の範囲が極端に狭いため、3Dレーザースキャナーのような“白黒画像”で対象物を表示することができません。シェーディング機能を追加することで、立体感のある表現を実現できるようになりました。
左:Velodyneの生データ
右:シェーディング実行後の表示
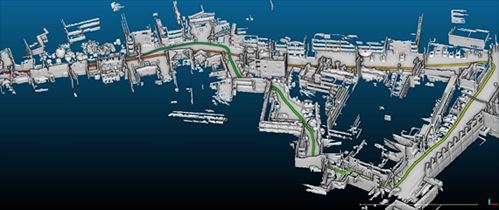 計測エリア全体をシェーディングで表示。データはモバイル 3Dスキャナー Stencilで取得可能。
計測エリア全体をシェーディングで表示。データはモバイル 3Dスキャナー Stencilで取得可能。
〇
その他の機能
UNDO/REDO、ターゲットのアライメント、ポリラインの作成、標高段彩と断面の作成など
仕
様
仕様
成
品
| |
DPI-8X SR(ショートレンジ) |
DPI-8X |
| 計測範囲 |
0.3~2.0m
|
0.6~3.8m |
| 測定距離 |
0.5m |
1m |
2m |
1m |
2m |
3.5m |
3.5m以上 |
| 精度 |
1mm |
2mm |
6mm |
2mm |
6mm |
10mm |
10mm |
| 最大の誤差 |
2mm |
4mm |
9mm |
4mm |
9mm |
16mm |
16mm |
| センサー |
PrimeSense Carmineセンサー 1.08、近赤外線とカラー(RGB)画像 |
| タブレットPC |
アンドロイド・タブレット 8インチ |
| OS |
Android 4.2 /4.4 |
| ディスク |
オンボード、16 or 32GB フラッシュドライブ |
| データ転送 |
USB 2.0/3.0 microUSBコネクター、WiFi |
| 重量 |
1kg 以下 |
| 寸法 cm |
20 cm x 24 cm x 6 cm |
| 使用温度と湿度 |
15°C~32°C(推奨温度 ※タブレットが起動する県境であれば動作可能)、結露しないこと |
| 出力フォーマット |
PTS, PTX, PLY, Cyclone™, E57 (予定) |
成
品
構
構成品
成
品
| 標準構成品 |
本体(タブレット付)、充電器、充電器用USBケーブル、グリップ、接続ケーブル(USB)×3、USBメモリー(8GB)、取扱説明書、収納ケース |
| オプション |
ノートパソコン(点群データ処理ソフトウェア OPT CloudSurveyインストール済み) |